傳統(tǒng)的垂直提升機正力減速經(jīng)典線路在進入減速段時簡單地控制轉(zhuǎn)子接觸器,使約一半級數(shù)的電阻重新接入轉(zhuǎn)子伽從切8級變?yōu)榍?級電阻),此時電動機轉(zhuǎn)速曲線如圖1所示環(huán)考慮閘的作用)
。
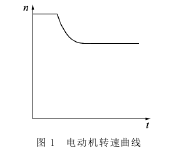
從圖1中可以看出 ,由于阻值按照等比數(shù)列設(shè)計,一半級數(shù)的電阻投入只是使電動機特性變軟
,但電動機所能輸出的最大力矩仍遠遠大于負載力矩
,減速后的終速仍大于半速,遠遠不能滿足降到爬行速度的要求。由于隨著速度的降低
,輸出力矩逐漸變大
,故減速過程是個變減速度曲線
,與要求的恒減速度曲線值線減速)相差甚遠
。
基于以上原因,無論減速時切換到哪一級均不能滿足要求:若切掉級數(shù)過多 ,則終速度過高;若投入全電阻甚至電動機定子斷電
,則終速度過低,甚至發(fā)生失速倒轉(zhuǎn)
。即使碰巧終速度滿足爬行速度的要求
,但減速曲線為變減速度,不能滿足恒定減速度要求
。
在傳統(tǒng)的控制線路里,能采用的辦法就是用閘閉環(huán)強行壓制速度,即施加機械制動力來增大電動機的負載
,結(jié)果是減速初期減速度過大
,初期閘并不參與減速,到后期閘力不斷加強
,與電動機抗衡
,直到把速度降低到爬行速度
。
施閘的過程不但會造成閘盤和制動器的嚴(yán)重發(fā)熱,同時電動機也增加能耗。由于垂直提升機提升用電動機一般都具有2倍以上的過載能力
,工作閘要想克服電動機的拖動力并達到要求的減速度非常困難
。制動發(fā)熱會降低摩擦因數(shù),甚至使閘盤變形
,閘瓦與閘盤的磨損將直接影響制動力
,長期如此使用,必然造成安全性急劇下降
。因此
,傳統(tǒng)的控制系統(tǒng)基本無法使用自動化的操作方式,只能靠司機手動操作
。
相關(guān)標(biāo)簽:垂直提升機
相關(guān)產(chǎn)品
相關(guān)新聞

 24小時服務(wù)熱線
24小時服務(wù)熱線 手機二維碼
手機二維碼

